暫く時間が空いてしまいました。
現在試作中の1号機を投入中ですが、実際に使用してみると気になる点や、システムとして気になる点などあり、少しづつですが改善中です。
まずは、以前の記事を書いた時点で困っていた「ねじれ負荷軽減」「衝撃軽減」用のコンパネですが、製造の目途が立ったところです。
木工好きのお友達に知恵を借りたところ、誰でも簡単に量産できる技を伝授していただきました。
まだ実際にやってはいませんが、準備ができたところで実際に製造してみるつもりでいます。
現在は、箱わなセンサー自体の改良を行いながら、周辺機器開発を行っているところです。
ですが、1号機を投入してしまい、色々と開発に支障が出始めたので2号機の制作を行いました。
外目はあまりかわらないですが、ケースの中は、1号機からアップデートされています。
まずは、基板はDIY基板から工場で製造した基板へ置き換えられ、回路も一部変更しています。
さらに、ケース内配線の改良するために中華製のビニールケーブルを撤去し、別のモノに置き換えました。
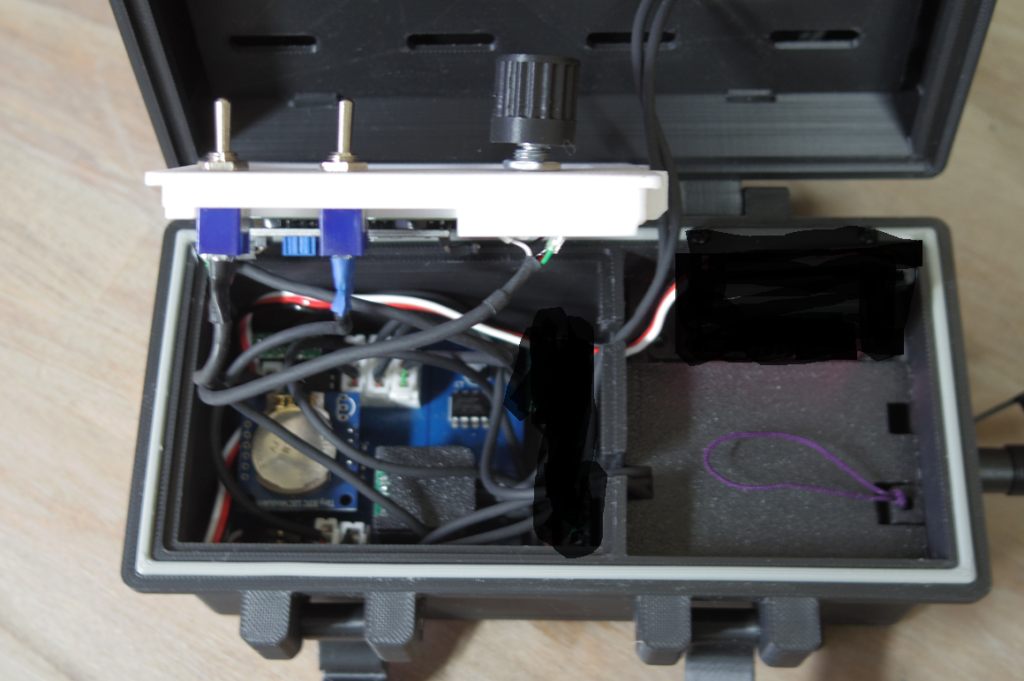
コントローラと操作部を中華製ケーブルで接続していたのですが、折り曲げで何度か障害が発生したので、「協和ハーモネット スリムロボットケーブル 」に交換しました。
このケーブルはとにかく柔らかく安心です。
下記は、ケースを開けた画像ですが、黒いケーブルが置き換えたケーブルです。
今のところ、箱罠センサーの周辺機は、2機搭載予定です。
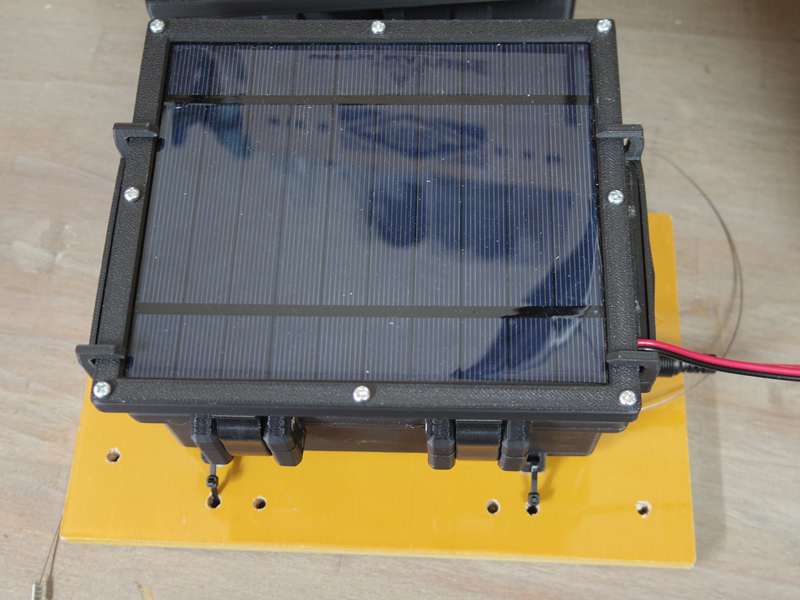
1つは、電池寿命を延ばすための太陽光パネル。
電磁寿命は、1回のバッテリー交換で頑張っても1月弱程度しか持たないので、すこしでも延命するためです。
現在、太陽電池は移動可能としていますが、デフォルトは下記のように箱罠センサーの上に乗っけるように設計してあります。
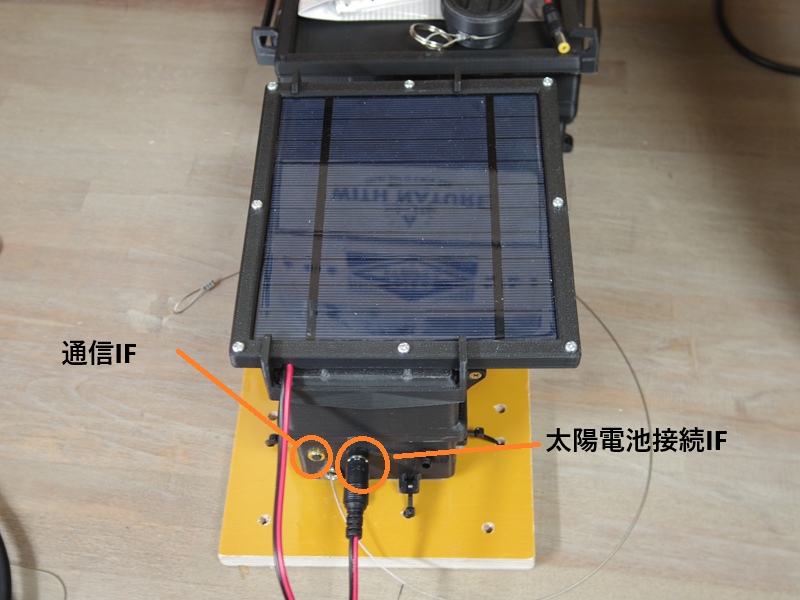
もう一つの周辺機は、箱罠管理用の通信装置です。
こちらは、箱わなセンサーの重要機能の一つ。
どう考えても、現在のくくり罠用のセンサーでは箱罠の運用には耐えられないので、箱罠専用設計を行います。
装置はまだ影も形もありませんが、接続IFだけは1号機にも搭載済みです。
今回、やっと2号機ができて通信機器開発に着手できそうになりました。
この記事を公開したころに、試作用部品の発注も行う予定です。
まだ時間はかかりそうではありますが、5月6月あたりにはフル装備の箱罠センサーを試したいと思っています。さらに、年末に新くくり罠センサーを投入できれば、お山のDX化が達成できそうです。
目下の最大の問題は、没頭する時間がないことですね…(趣味に没頭したい…誰か仕事してくれないかなぁ~)

