 OSOYOO PI CAR
OSOYOO PI CAR OSOYOO PI CARキット ROS2化 #11 – ORB_SLAM3 姿勢推定の改良 その2
前回は、カメラのIMU情報をROS2標準メッセージに変換して配信しました。今回は、その情報を取得してORB_SLAM3に入力します。ORB_SLAM3は、撮影時間、IMUの取得時間をキーにして撮影時のIMU情報を近似、生成させているものと想...
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR 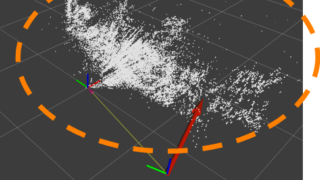 OSOYOO PI CAR
OSOYOO PI CAR 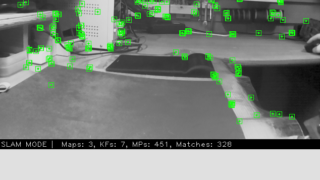 OSOYOO PI CAR
OSOYOO PI CAR