 OSOYOO PI CAR
OSOYOO PI CAR OSOYOO PI CARキット ROS2化 #11 – ORB_SLAM3 姿勢推定の改良 その2
前回は、カメラのIMU情報をROS2標準メッセージに変換して配信しました。今回は、その情報を取得してORB_SLAM3に入力します。ORB_SLAM3は、撮影時間、IMUの取得時間をキーにして撮影時のIMU情報を近似、生成させているものと想...
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR 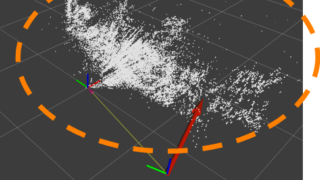 OSOYOO PI CAR
OSOYOO PI CAR 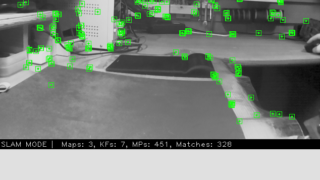 OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR