 OSOYOO PI CAR
OSOYOO PI CAR OSOYOO PI CARキット ROS2化 #14 – ORB_SLAM3(単眼)自律制御
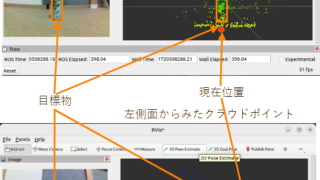
ここ数週間、ORB_SLAM3(単眼)を使い、自律制御で下記のような軌道で目標物を周回することを目指してきましたが、力尽きてしまいました。 結果としては、上記軌道では、制御不能でした。技術課題は、主に下記の2つです。 車を転回するとSLAM...
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR