Amazonを見ていて、ついつい「PI CARキット」を衝動買いしてしまいました。
カメラ、超音波センサー、モーター、PWMコントローラ、電圧計、18650、充電器までついて8,299円。
こういうものを一から自力で作ろうとすると、意外にお金がかかったり、時間や手間がかかるのと、少々遊びたかったので購入しました。買ったキットは、「OSOYOO ロボットカーキット」。
正直OSOYOOというメーカーも何も知らなかったのですが、見ると英語の組み立てマニュアルもありましたので大丈夫そうだと判断して、購入しました。(日本語チュートリアルはありましたが、実際の説明は英語というあるあるパターン)
pythonベースで、下記のチュートリアルが用意されています。
動かしてみたいだけならレッスン通りにやればよいと思います。
お勉強する場合は、コードは付加されていますが特に制御方式等の解説はないので、自力で解析することになります。私は、一応すべてやってみましたが、結構楽しく遊べました。
カメラまであるので、もっと色々と遊べそうな気がします。
今回は、組み立てに関していくつかハマりポイントがありましたので、組み立てについて説明させていただこうと思います。
- Lesson1:組み立て
- Lesson2:ライントラッキング
- Lesson3:障害物の回避
- Lesson4:iPhone、androidで制御する
- Lesson5:簡単なWebServerを作る
- Lesson6:ウェブカメラ制御
記事を書いてみたのですが、意外に長かったですが御勘弁いただければと思います。
■ Lesso1:組み立ての説明(シャーシの組み立て編)
基本的には組み立てマニュアル通りに組み立てればよいかと思います。
シャーシの組み立ては、13ステップで構成されています。
シャーシの組み立て完了後、配線を行います。
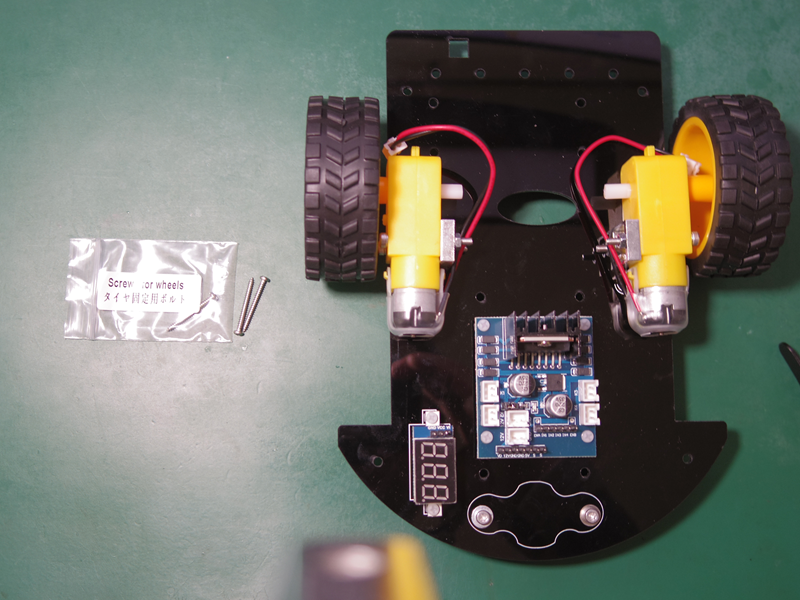
〇 ステップ1(組み立て準備)
ボディーのフレームとなるアクリル板が2枚あり、保護シールをはがすだけです。
片面にはシルク印刷されていますが、片面は保護シールが貼られています。

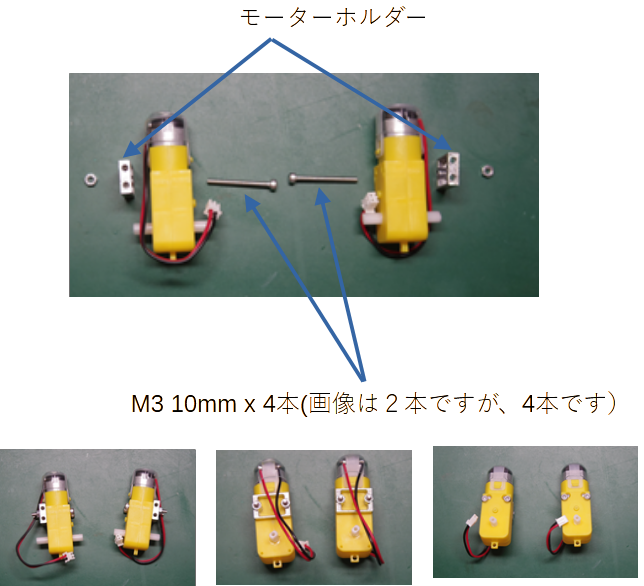
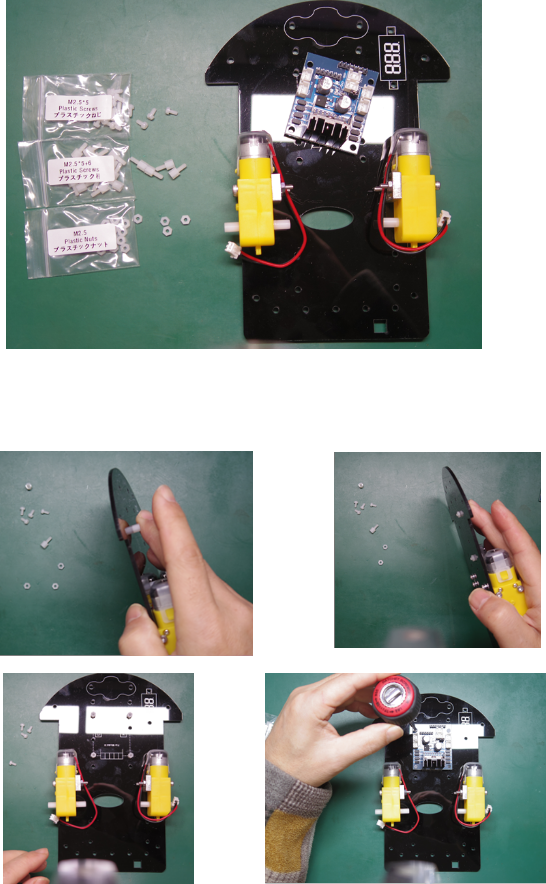
〇 ステップ2(モーターの組み立て)
必要な部品は、下記のモーターと、モーターホルダーです。
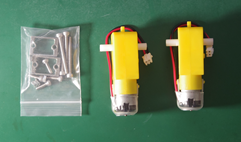
これを下記のように組み立てます。モーターホルダーの穴、モーターの電源ケーブルの接続広報に気を付けて、下記のように組み立てます。
モーターホルダーとモーターとの接続方向に木をつけて組み立ててください。
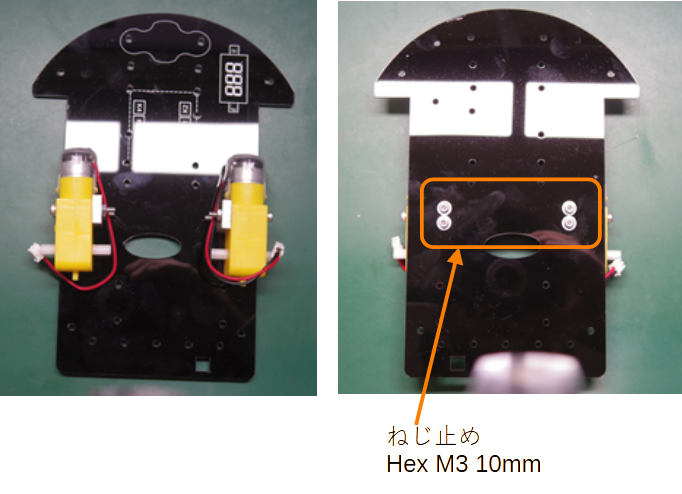
〇 ステップ3(モーターホルダーの組み立て)
組み立てたモーターを下シャーシ(下記のシルクが印刷されているシャーシ)にHex M3 10mmで組付けます。写真ではワッシャー(非添付)を入れました。モーターのパワーからして、不要だと思います。私は、この時点ではよくわからなかったので、念のため入れました。
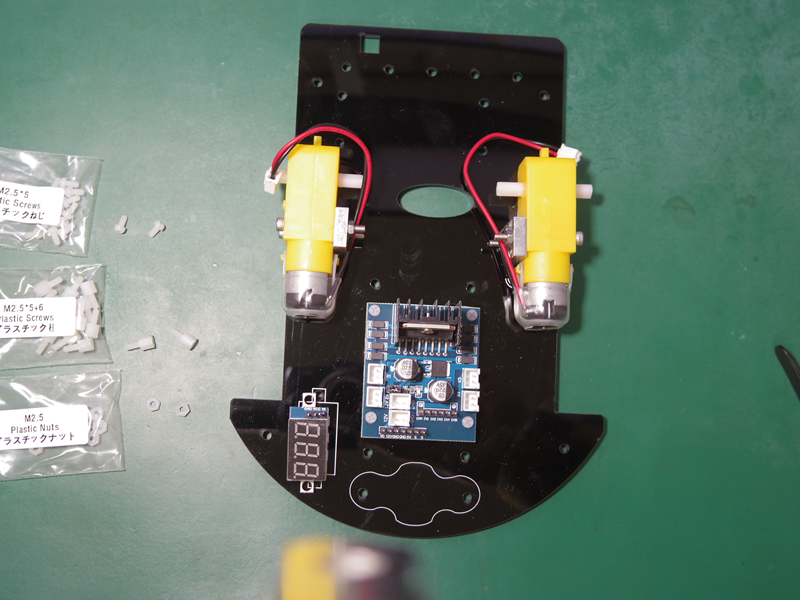
〇 ステップ4(モータードライバ組付け)
モータードライバを下シャーシに組付けます。
モータードライバは、下記のプラスチックネジで組付けます。
プラスチック柱を下シャーシ裏からプラスチックナットで固定します。
モータードライバをプラスチック柱の上に置き、プラスチックネジで固定します。
M2.5 5mm プラスチックネジ × 4
M2.5 5mm/6mm プラスチック柱 × 4
M2.5 プラスチックナット × 4
〇 ステップ5(電圧計の組付け)
画像が少し切れてしまっていますが、電圧計を下記プラスチックネジで下シャーシに固定します。
固定方法は、ステップ4同様に下シャーシの上にプラスチック柱を立てて電圧計を載せます。
M2.5 5mm プラスチックネジ × 2
M2.5 5mm/6mm プラスチック柱 × 2
M2.5 プラスチックナット × 2
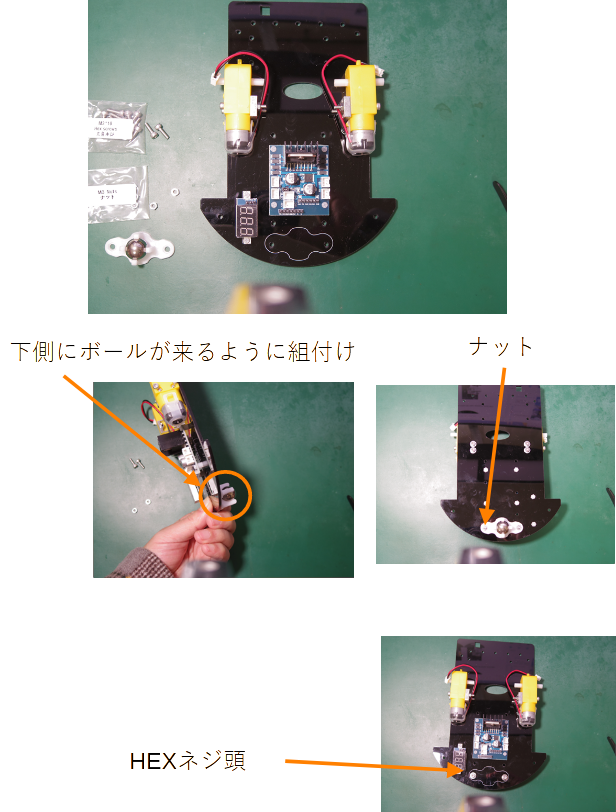
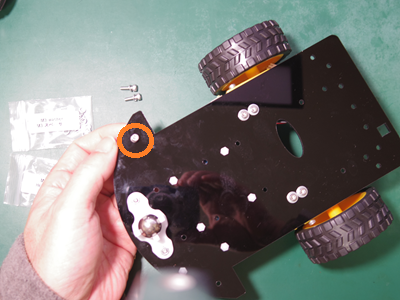
〇 ステップ6(ユニバーサルホイールの組付け)
ユニバーサルホイール(車の後ろ側を支える玉)を組付けます。
説明では、M2.5と記載がありましたが、おそらく記載ミスです。
ネジ、ホイールは下記のように組付けます。
HEXネジ M3 10mm × 2
M3 ナット × 2
〇 ステップ7(駆動輪の組付け)
駆動輪をモーター軸に差し込んで下記のように止めます。
この時に注意しないといけないのが、駆動輪をぴったりと押し込んでしまうと、後で車輪が動かなかったりうごきが悪くなります。軽くでOKです。
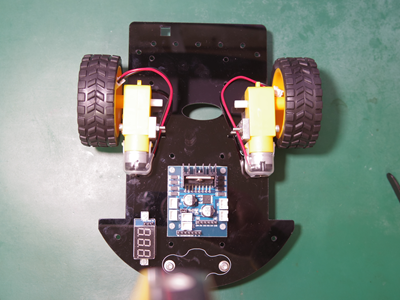
次に、タイや固定ボルトでタイヤを固定しますが、こちらも先ほどと同様の注意点があります。
ねじできつく締めこんでしまうとタイヤが回りません。
モーターのトルクはそんなにはないので、車輪が抜けない程度に軽めに止めます。
車輪を回して軽く回るようであれば大丈夫です。
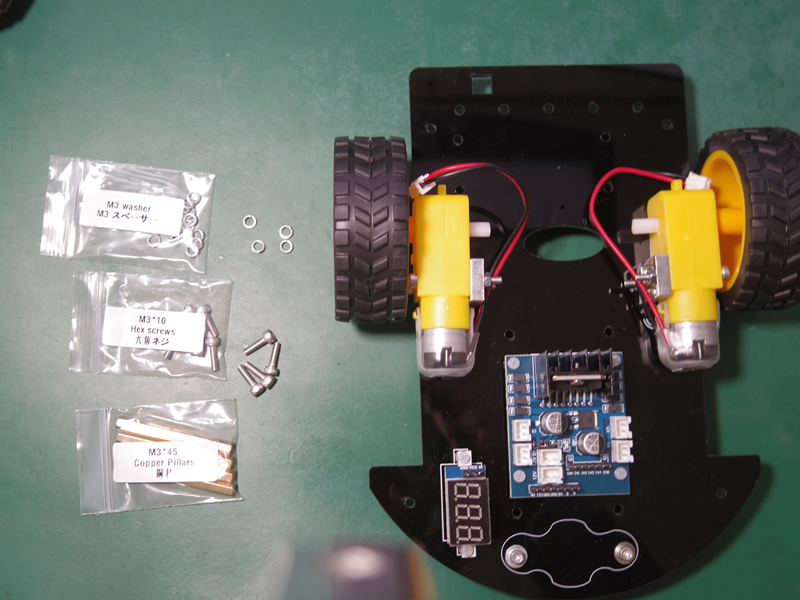
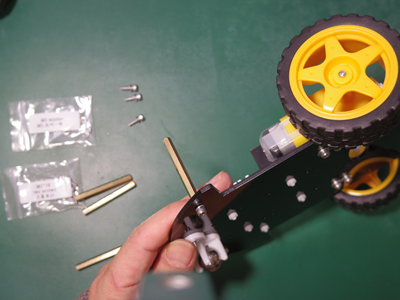
〇 ステップ8(上シャーシ固定用柱の組付け)
下記の部品を用意ます。
M3 スペーサー × 4
M3 10mm 六角ネジ x 4
M3 45mm 真鍮支柱
まずは、下記のように六角ネジにスペーサーを差し込みます。

ネジを下シャーシの裏側から下記のように差し込みます。
この後、下記のように柱を立てます。
あとは同様に残りの柱をたてて下記のように仕上げます。
〇 ステップ9(上シャーシへの電池ボックス組付け)
下記の部品を用意します。
上シャーシ
電池ボックス(下ケース、上ケース)
M3 10mm(低頭ネジ) x 4
M3 ナット x 4
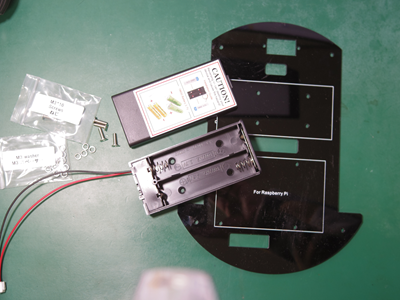
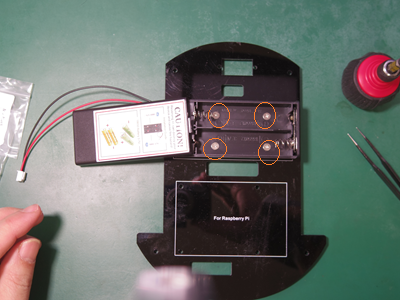
下記のように皿ねじを電池の下ケースに差し込み上シャーシに裏からナットをしめて固定します。
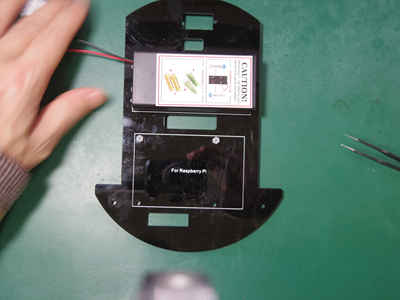
〇 ステップ10(ラズベリーパイ固定用柱の組み立て)
下記部品を用意します。
M2.5 56mm プラスチック柱 x 2
M2.5 プラスチックナット x 2
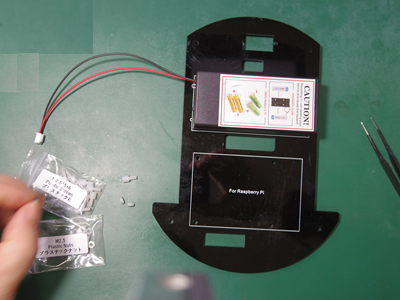
これを下記のように固定します。
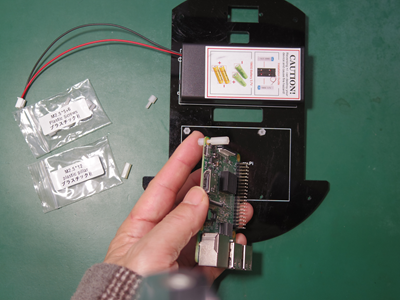
〇 ステップ11(ラズベリーパイの準備)
下記の部品を用意します。
M2.5 13mm プラスチック柱
M2.5 56mm プラスチック柱

プラスチック柱を下記のようにラズベリーパイにセットします。
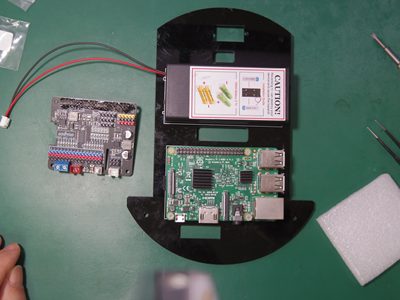
〇 ステップ12(ラズベリーパイの固定)
下記のようにラズベリーパイを上シャーシの上に置き、固定します。(印部分に挿入します)
M2.5 56mm プラスチック柱 x 2

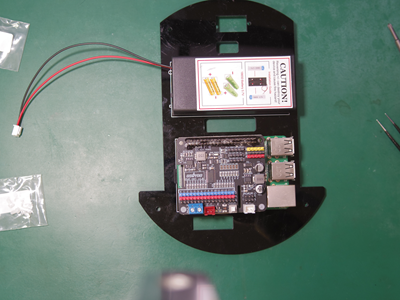
〇 ステップ13(PWM HATの組付け)
ラズベリーパイにPWM HATを組付けます。
ラズベリーパイのピンヘッダに差し込むだけですので、特に迷うことはありません。
■ Lesso1:組み立ての説明(配線編)
〇 Step1(駆動モーターの接続)
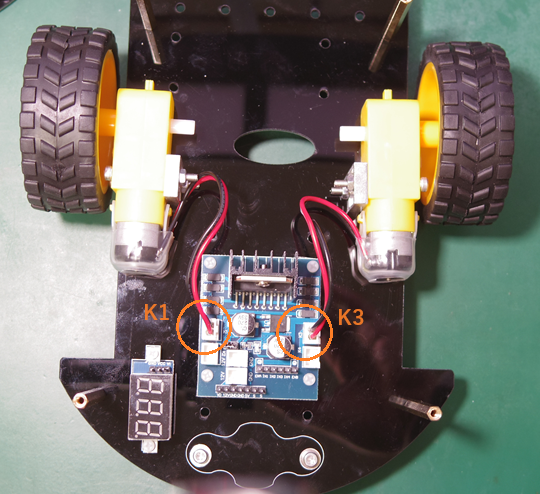
下シャーシの駆動モーターをモーターコントローラに接続します。
左モーターはK1、右モーターはK3に接続します。
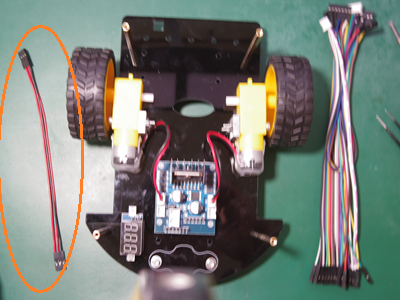
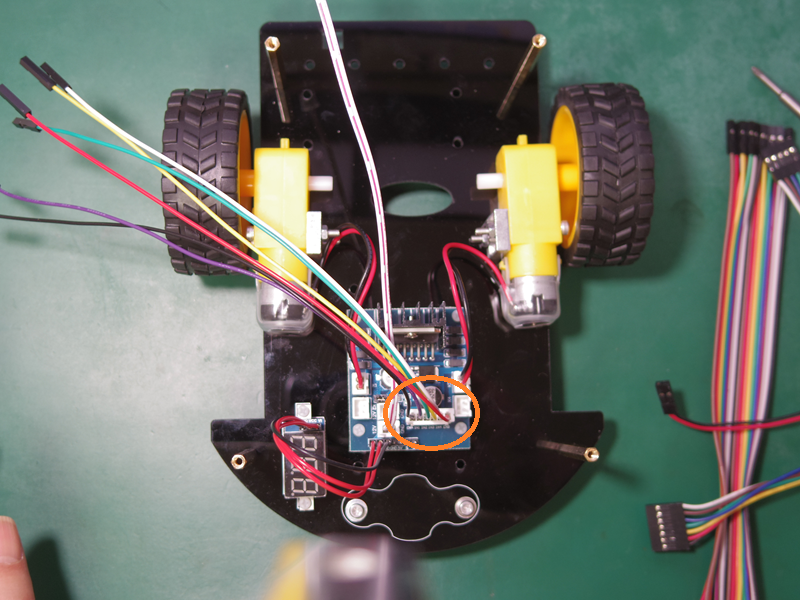
〇 ステップ2(電圧計/モータードライバ接続)
下記のように3ピンのコネクタを用意します。
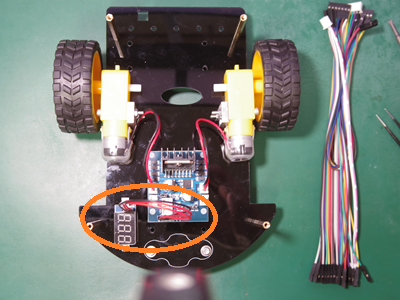
下記のように配線します。
| モータードライバ | 電圧計 | 配線色 |
| GND | GND | 黒 |
| 12V | VCC | 赤 |
| VO | VT | 赤 |
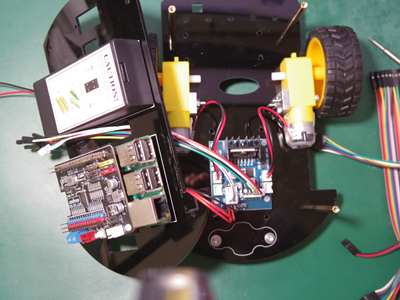
〇 ステップ3(モータドライバ、PWM HATの接続)
モータードライバ(下シャーシ)とPWM HATを下記のように接続します。
| モータードライバ | PWM HAT | 2PIN電源ケーブル 配線色 |
| 12V | V+ | 赤 |
| GND | GND | 白 |
| モーターっドライバ | PWM HAT | ケーブル配線色 |
| ENA | PWM0 | 黒 |
| IN1 | PIN16 | 紫 |
| IN2 | PIN18 | 緑 |
| IN3 | PIN13 | 黄色 |
| IN4 | PIN15 | 白 |
| ENB | PWM1 | 赤 |
下シャーシの印部分に2PIN電源ケーブルを挿入します。
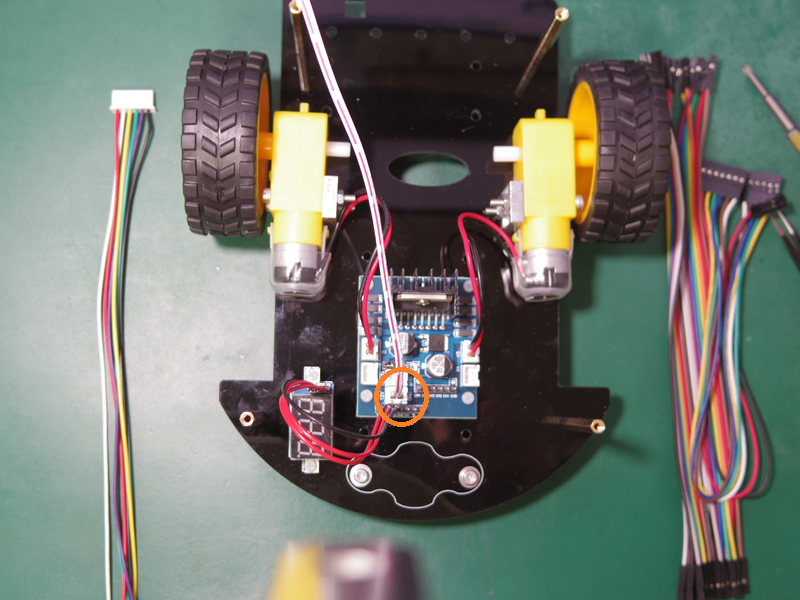
次に下記の印部分に配線ケーブルを挿入します。
接続した2PIN電源ケーブル、配線ケーブルを上シャーシの穴に通して、配線を行います。
配線を通したあと、下記の印部分にすべてのケーブルを接続します。
接続先は、最初の表に従って接続してください。
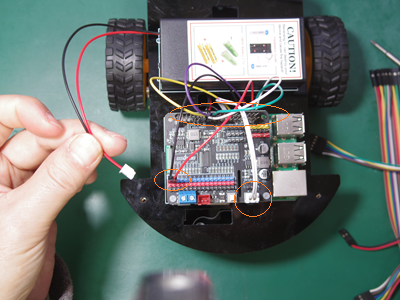
〇 ステップ4 (18650電源ケーブル接続)
次に、18650の電源ケーブルをPWM HATの印部分に接続します。
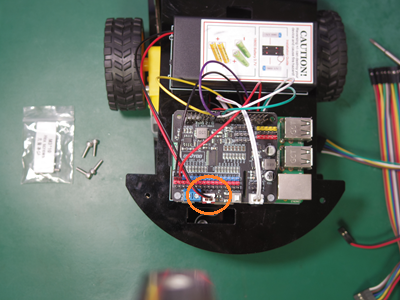
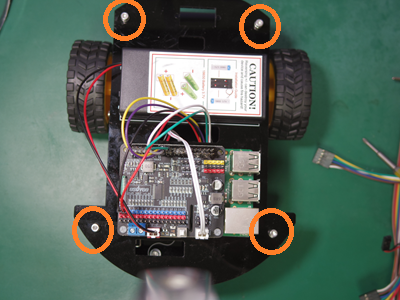
〇 ステップ5(シャーシの固定)
ここまで来たら後は上下シャーシを下記部品で画像印部分を固定します。
M3 六角ネジ × 4
ワッシャ × 4
〇 ステップ6
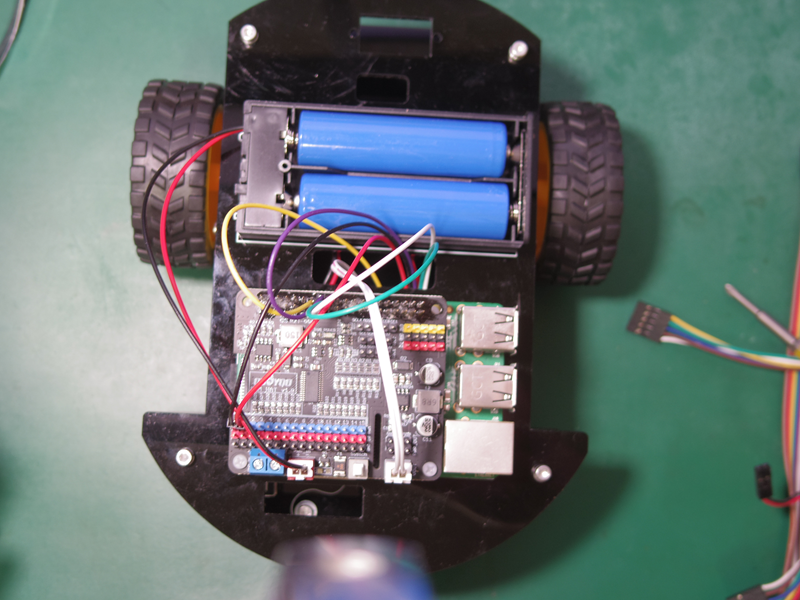
最後は18650を下記のように逆刺し等に気を付けてセットすれば完了です。
ばねのついている端子がマイナス側です。
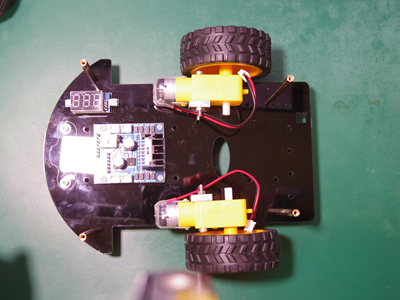
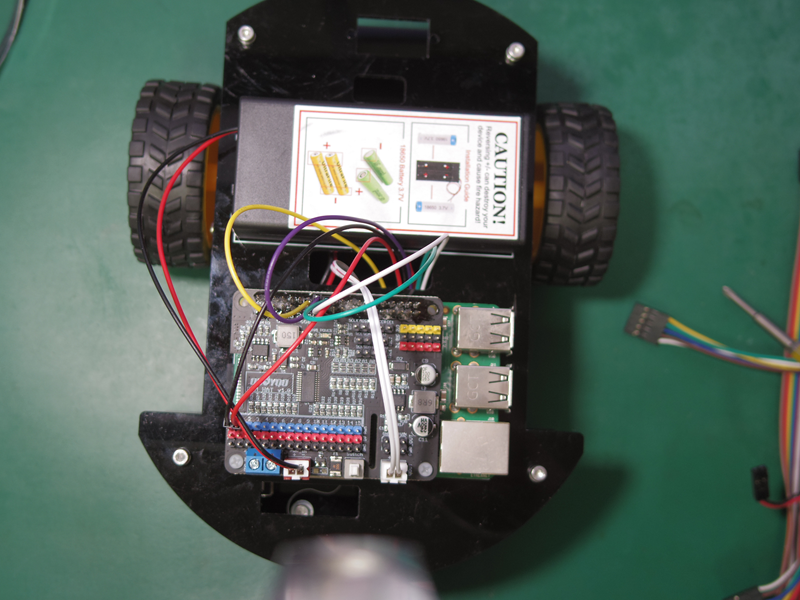
〇 完成
あとは電池ボックスを締めれば、基本の組付けは完了です。
あとは、ラズパイにOSをっ導入後、レッスン毎にセンサー、プログラムを実行すれば動きます。
私は、ラズパイ3Bを接続しましたが、特に大きな問題等ありませんでした。
基本の組付けでハマるのは、タイヤの接続だと思います。
このキットは、とにかくモーターにトルクがないので、タイヤが落ちない程度にネジをゆるゆるに占めることがコツだと思います。きっちり締めると車は思うように動きません。
■ 次回
長くなってしまいましたが、今回はOSOYOO PI CARを組み立てマニュアルを補足しました。
マニュアルが分かりにくい部分もありましたので、基本部分のみを補足してみました。
お役に立てることができれば幸いです。
次回以降は、しばらく、OSOYOO PI CARの本来の使い方ではない方法で遊んでみようと思います。
また、よろしければ見ていただけると嬉しいです。(長かった…)