 WORKS
WORKS 実体顕微鏡 照明 バージョンアップ LEDテープバージョン
以前に顕微鏡用の照明を制作して長年使ってきました。光量は程よく、見ている箇所に影が出ることも少なく、テスタージグとの相性もよく、概ね満足していましたが、最近、チカチカするようになってきたのでアップデートすることにしました。変更した照明は、下...
WORKS 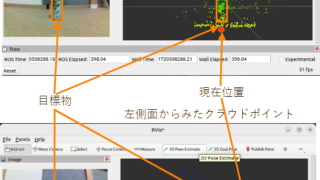 OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR 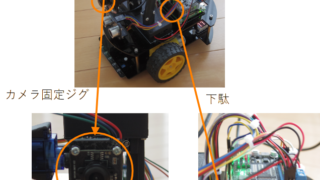 OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR 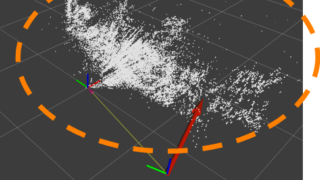 OSOYOO PI CAR
OSOYOO PI CAR 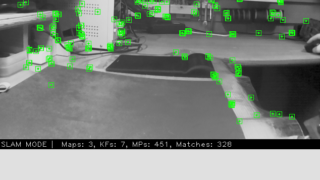 OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR