 WORKS-hunting
WORKS-hunting サラリーマン猟師必須の「わな管理システム」
「わなの作動センサー」を試作してから2年以上経過しました。運用していく中で色々と不満が出てきたこともあるのですが、私自身を取り巻く環境も2年前から大きく変化し、圧倒的に仕事や家庭に時間を割かざるを得ない状況となっています。さらに、2年前はく...
WORKS-hunting  WORKS-hunting
WORKS-hunting  わな見回り日記
わな見回り日記  わな見回り日記
わな見回り日記  わな見回り日記
わな見回り日記  わな見回り日記
わな見回り日記  わな見回り日記
わな見回り日記  わな見回り日記
わな見回り日記 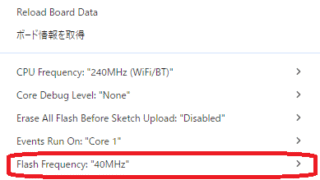 ESP32
ESP32  わな見回り日記
わな見回り日記