前回は、親機基板のデバッグを行いましたので、実験用ファームの準備を行い、子機の確認、デバッグを行いました。結果としては、何とかなりましたが、子機も致命的な問題を抱えていました。
少々ATTINY202の使い方をいい加減に理解していたことによる動作不具合がありました。
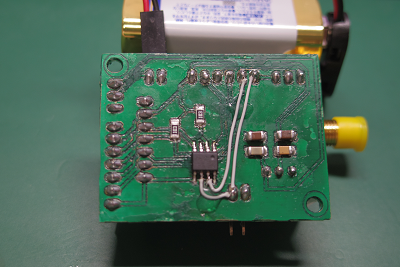
子機も親機同様にジャンパー線だらけの基板になってしまいました。
■子機不具合 – ATTINY202のわな
子機不具合の原因は、一言でゆうとATTINY-202の使い方を理解していなかったということです。ATTINY202のピンアサインはデータシートによると下記のように示されていました。
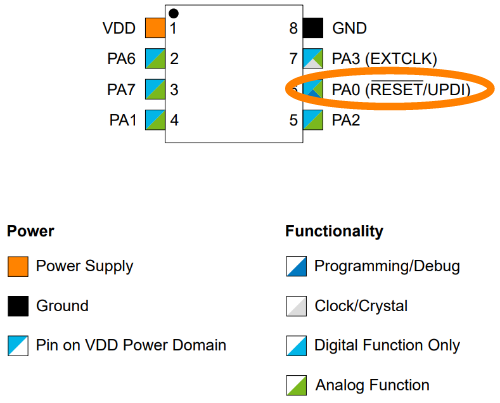
これだけだと、なにかわからないと思いますが、自分は何となくこの絵から「大丈夫だろ」と思い込みで設計してしまいました。
自分がちゃんと読んでいなかったことが原因なのですが、印をつけたピンは、ArduinoとしてATTINY202を使用する場合には、出力用には使用できず、入力用としてのみ使用可能でした。
私は、6番ピンをLoRaの動作モード指定用(出力)にピンアサインしていたので、思うように制御できていませんでした。
とりあえず強引でも修正できてよかったです。
■ 通信試験
子機の修正も終わったので、早速、通信試験を行うことにしました。
今回作成している親機、子機ですが通信距離として最低でも2Kmくらいの通信距離が欲しいところです。正直、これよりも距離が短い場合は、自分の使用目的には使えないと思っています。
〇 試験方法
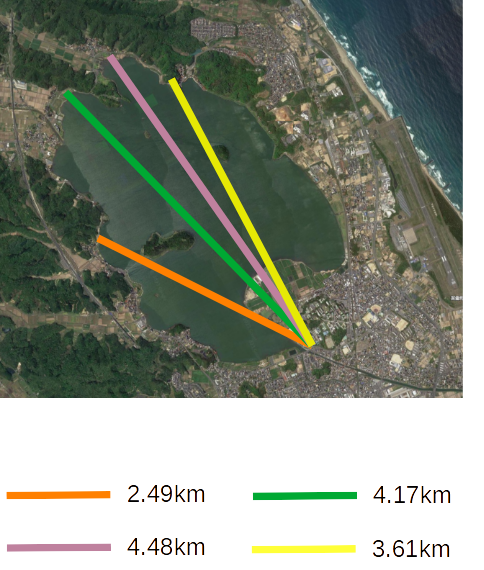
試験方法は、自宅に子機を置いておき、親機を外にもって出て、どのあたりまで通信できるのかを確認します。自宅は、湖近くに位置しているので、湖の対岸で計測してみることにしました。
駐車スペースの関係から、下記の4か所で計測を行いました。
〇 計測機器
子機は、9V電池につなぎ、自宅ベランダに設置しました。
親機は、モバイルバッテリーに接続して、車で計測ポイントまで運びました。
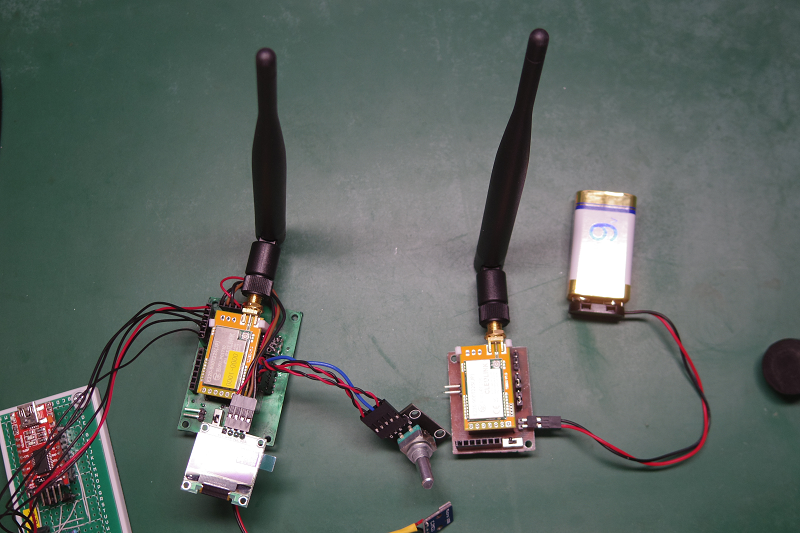
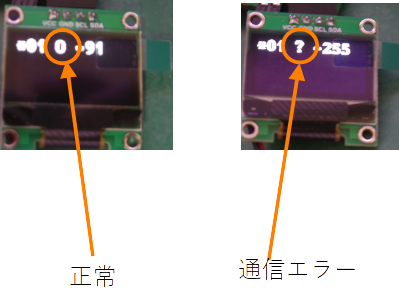
親機には、下記のようにディスプレイに通信状態を表示するようにして置き、各計測箇所で図りました。なお、計測はすべて車の中で行いました。
〇 結果
結果は、全計測ポイントで通信エラーは発生せず、良好でした。
通信距離が4kmを越しても安定動作しており、電波強度的には余裕があるように見えました。
ですが、計測ポイント以外での計測では、ポイントによってはもっと短距離でもエラーになることがありました。地形的に家が山や谷ですっぽりと遮られるポイントでは、通信エラーとなることもあるようです。
ですが、自分の使用しようと思っている環境では、今回の実験環境より、短距離かつ、見通しの良い場所で使う予定ですので、問題はないように思えます。
■ 次回
今回は、E220-900T22S(JP) がちゃんと実仕様レベルで使えることが判明して安心しました。
次回は、LoRaモジュール今のまま外にもってでると、そのうち基板を壊しそうなので、ケースに収めていこうと思います。よかったら、また、のぞいていただけるとありがたいです。

