 OSOYOO PI CAR
OSOYOO PI CAR OSOYOO PI CARキット ROS2化 #13 – ORB_SLAM3 カメラキャリブレーション
ROS2とPiCarを一式Raspberry PI5に搭載したのですが、カメラを変更しました。また画像フォーマットもMotion Jpegに変更しましたので、キャリブレーションすることにしました。私がORB_SLAM3で使用するモードは、単...
OSOYOO PI CAR 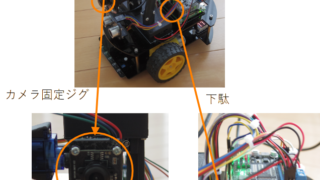 OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR