 OSOYOO PI CAR
OSOYOO PI CAR OSOYOO PI CARキット ROS2化 #9 – 自己位置推定の検討 ORB-SLAM3 実用化設計
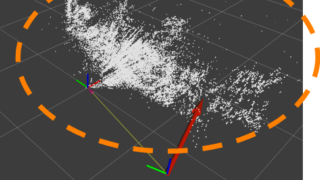
前回は、とりあえずORB-SLAM3をROS2に搭載しましたが、搭載しただけでは情報を使う術はありません。ノード終了時に軌道をファイル保存していますが、これで、リアルタイム自律制御は不可能だと思います。そこで、今回は情報を参照できる様に前回...
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR  OSOYOO PI CAR
OSOYOO PI CAR